通过互补滤波获取姿态角度
最近在做轮腿小车,其中需要通过陀螺仪获取小车的实时角度值。学习了一下有关互补滤波的内容,在此记录一下。
互补滤波的核心是融合陀螺仪和加速度计的数据,用陀螺仪保证动态响应,用加速度计修正长期漂移,输出稳定且实时的角度估计。
陀螺仪检测系统的三轴角速度值,加速度计检测三轴的加速度值(在静止状态下,主要检测重力加速度的三轴分量)。根据以上传感器数据,我们需要得到系统的实时姿态角度有两种办法:1. 通过陀螺仪给出的角速度数据积分得到角度值;2. 通过加速度计给出的加速度数据进行反正切运算得到角度值。
1. 角速度积分得到角度值
方法
我们知道,在极小的一段时间\(\Delta t\)内可以将系统的运动视为匀速。因此这段时间内转过的角度为\(\Delta \theta = \omega \Delta t\)。对其进行积分就可以很容易得到当前的角度值:
\[\theta_{gyro} = \int_0^t\omega dt\]
局限性
但是这种方法存在一个问题,就是从陀螺仪获取的角速度数据每时每刻都存在误差,而积分这种操作会将这种误差累积导致积分得到的角度值存在漂移。而这种漂移误差在低频段会被积分放大,最终主导输出结果,使得角度严重偏离真实值。而在高频场景下,例如小车快速晃动,此时陀螺仪的有效角速度信号远大于低频漂移的信号,此时对最终角度的影响可以忽略。
所以总结一下,通过角速度积分得到的角度值在动态情况下表现尚可,而在静态情况下表现欠佳。
2. 加速度数据反正切得到角度值
方法
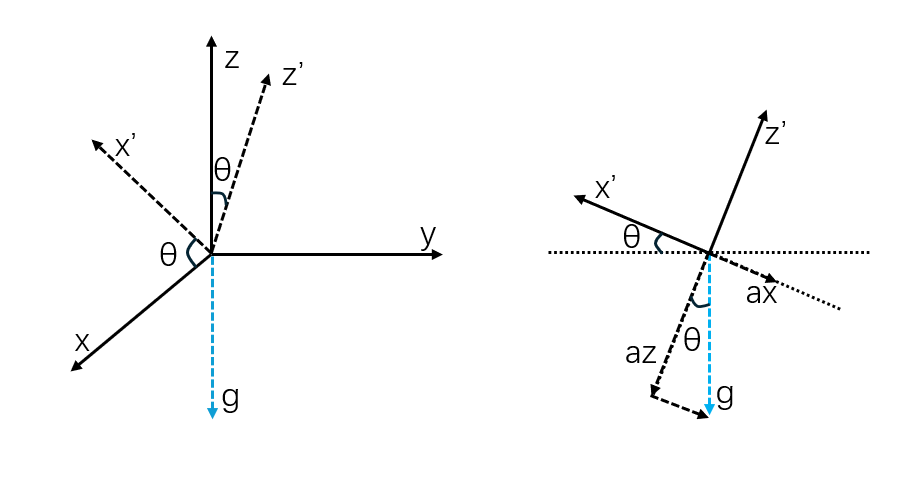
假定在静止状态下让系统绕y轴旋转一个角度\(\theta\),根据以上分析可以很容易得出系统的俯仰角:
\[\theta_{acc} = \arctan \frac{ax}{az}\]
局限性
但是这种方法同样也存在一个问题,就是高频段的振动干扰和运动加速度会掩盖有用的重力信号,无法准确获取静态角度参考。比如快速晃动小车,加速度计的输出是重力加速度、高频运动加速度的叠加,此时有用的重力信号被高频干扰淹没,无法通过加速度计计算出准确的角度。
总结一下,就是通过加速度反正切得到角度值在静态情况下表现尚可,而在动态情况下表现欠佳。
3. 通过互补滤波修正角度值
通过以上分析,我们可以发现陀螺仪和加速度计的频率特性是互补的。因此我们可以对其取长补短,在动态条件下更相信陀螺仪的数据,在静态条件下更相信加速度计的数据。
原理
通过设定权重参数\(K\)来选择我们是更相信陀螺仪的数据还是更相信加速度计的数据,所以最后的角度输出为:
\[\theta_{out} = K * \theta_{gyro} + (1-K) * \theta_{acc}\]
权重参数\(K\)的具体选择需要根据系统的具体应用场景来分析。
实现
具体实现代码如下:
/*
一阶互补滤波,标准版本
gyro_ 陀螺仪物理数据 °/s
acc_ 加速度计物理数据 m/s^2
filter_value->filtering_angle 存放滤波后的角度数据,为真实物理量,单位为角度制
*/
void FOCF_v2(float gyro_, float acc_, FOCF_STRUCT *filter_value)
{
float angle_gyro; // 由陀螺仪计算得到的角度
float angle_acc_rad; // 由加速度计计算得到的角度(弧度制)
float angle_acc; // 由加速度计计算得到的角度(角度制)
angle_gyro = filter_value->angle_temp + gyro_ * filter_value->call_cycle; // 积分得到陀螺仪角度
filter_value->angle_temp = angle_gyro;
angle_acc_rad = atanf(acc_ / acc_z_);
angle_acc = to_deg(angle_acc_rad); // 反正切得到加速度计角度并转化为角度制
// 加权求平均并修正零点
filter_value->filtering_angle = filter_value->v2_K * angle_gyro + (1 - filter_value->v2_K) * angle_acc + filter_value->mechanical_zero;
}